
컨텐츠 내용
- 수강신청
- 과정정보
[매치업] 자율주행 자동차 판단 기술 (심화)

과정소개
※※ 학습자 개인정보는 이수증/인증서 발급, 통계, 설문조사 진행을 위하여 국가평생교육진흥원 매치업 정보시스템으로 전달 · 관리됩니다
※ 매치업 교육 수강신청 문의는 02-870-8032로 부탁드립니다.
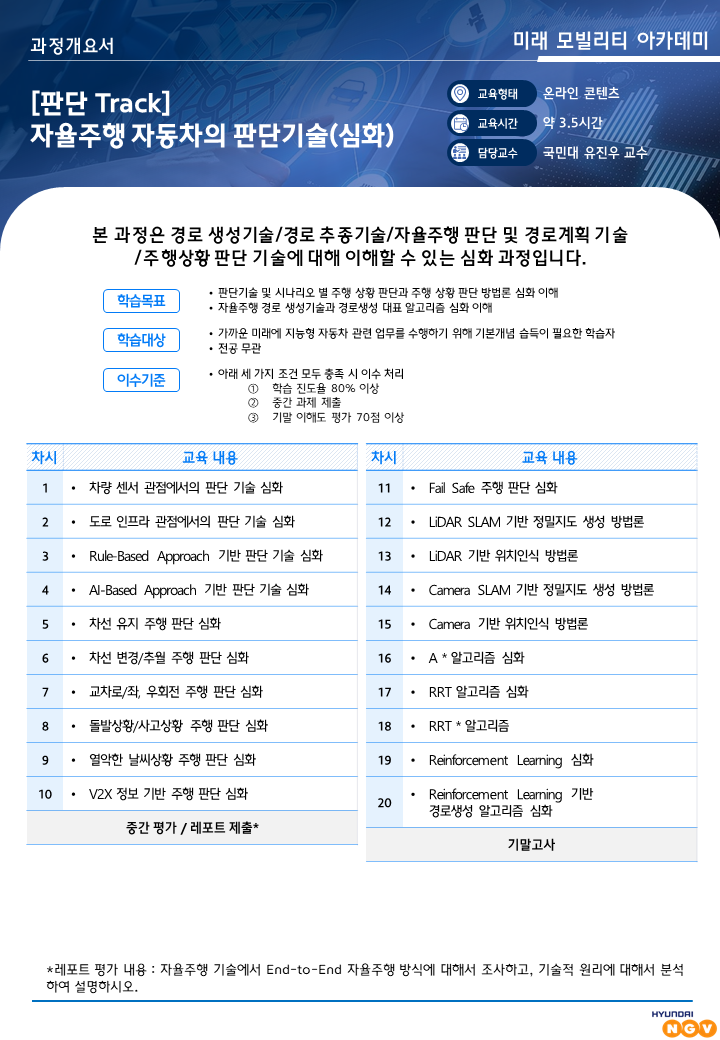
수료기준
| 평가기준 | 진도율 | (판단_심화) 기말고사 | (판단_심화) 신기술 및 기술개발 동향 조사 | 총점 |
|---|---|---|---|---|
| 배점 | - | 50% | 50% | 100점 |
| 수료기준 | 80% | 60점/100점 | 60점/100점 | 70점 |
※ 수료기준은 각 평가항목의 점수가 수료기준 점수 이상이고 총점이 70점 이상이어야 합니다.
강사소개
- 강사명
- 유진우
- 강사약력
▶ 학력
· 포항공과대▶ 경력
· 現) 국민대학교 자동차IT융합학과 교수- · 삼성전자 Samsung Research 책임연구원
- ▶ 주요 연구분야
- · 자율주행 요소기술 성능개선 연구
- · 차량 센서 기반 신호처리 및 영상처리 기술
- · Path Planning / SLAM / Perception 기술
| 차시 | 강의명 |
|---|---|
| 1주차 | |
| 1차시 | 차량 센서 관점에서의 판단 기술 심화 |
| 2차시 | 도로 인프라 관점에서의 판단 기술 심화 |
| 2주차 | |
| 3차시 | Rule-Based Approach 기반 판단 기술 심화 |
| 4차시 | AI-Based Approach 기반 판단 기술 심화 |
| 3주차 | |
| 5차시 | 차로 유지 주행 판단 심화 |
| 6차시 | 차로 변경/추월 주행 판단 심화 |
| 4주차 | |
| 7차시 | 교차로/좌,우회전 주행 판단 심화 |
| 8차시 | 돌발상황/사고상황 주행 판단 심화 |
| 5주차 | |
| 9차시 | 열악한 날씨상황 주행 판단 심화 |
| 10차시 | V2X 정보 기반 주행 판단 심화 |
| 6주차 | |
| 11차시 | Fail Safe 주행 판단 심화 |
| 12차시 | LiDAR SLAM 기반 정밀지도 생성 방법론 |
| 7주차 | |
| 13차시 | LiDAR 기반 위치인식 방법론 |
| 14차시 | Camera SLAM 기반 정밀지도 생성 방법론 |
| 8주차 | |
| 15차시 | Camera 기반 위치인식 방법론 |
| 16차시 | A* 알고리즘 심화 |
| 9주차 | |
| 17차시 | RRT 알고리즘 심화 |
| 18차시 | RRT* 알고리즘 |
| 10주차 | |
| 19차시 | Reinforcement Learning 심화 |
| 20차시 | Reinforcement Learning 기반 경로생성 알고리즘 심화 |
